Abstract
The complementary characteristics of active and passive depth sensing techniques motivate the fusion of the Li-DAR sensor and stereo camera for improved depth perception.
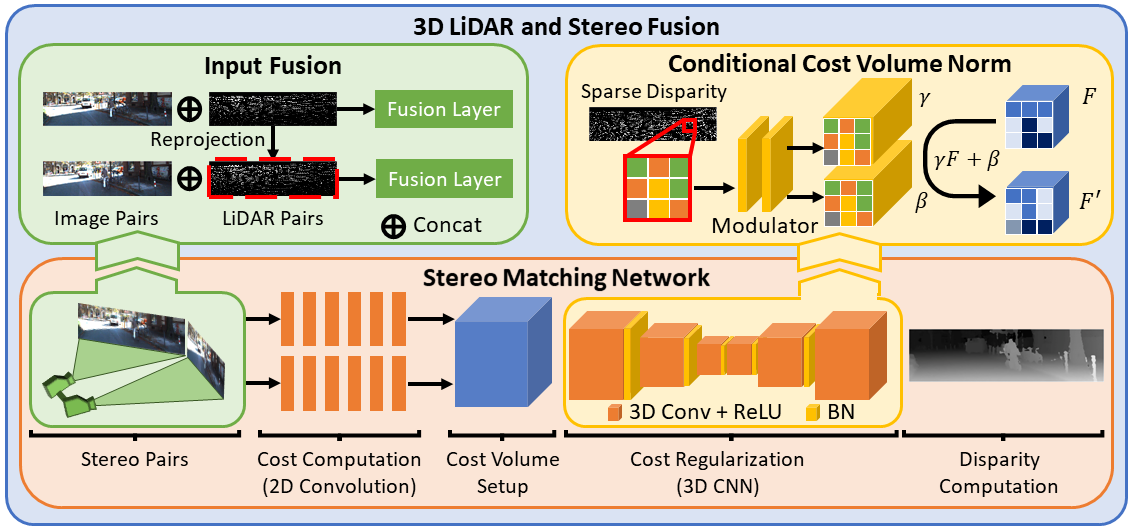
Instead of directly fusing estimated depths across LiDAR and stereo modalities, we take advantages of the stereo matching network with two enhanced techniques:
Input Fusion and Conditional Cost Volume Normalization (CCVNorm) on the LiDAR information. The proposed framework is generic and closely integrated with
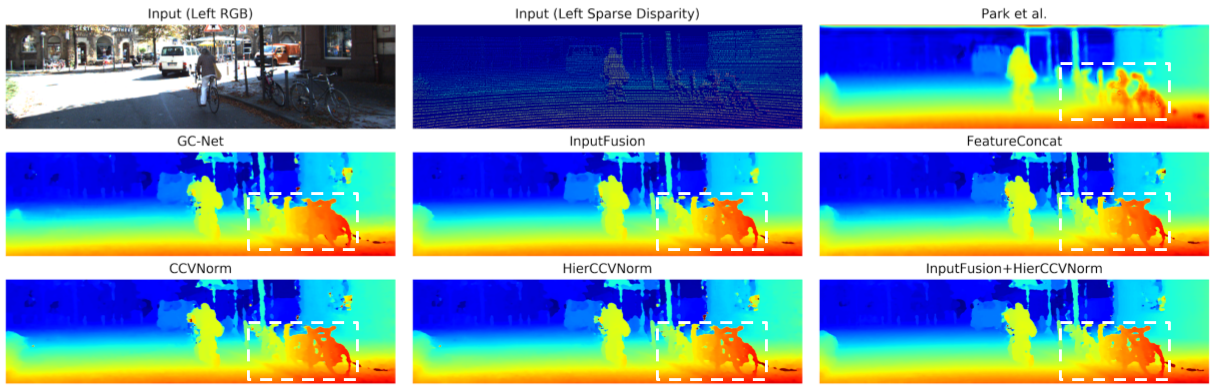
the cost volume component that is commonly utilized in stereo matching neural networks. We experimentally verify the efficacy and robustness of our method on the KITTI Stereo
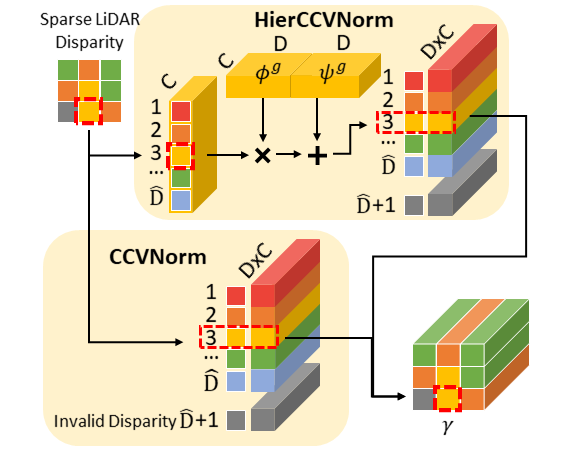
and Depth Completion datasets, obtaining favorable performance against various fusion strategies. Moreover, we demonstrate that, with a hierarchical extension of CCVNorm,
the proposed method brings only slight overhead to the stereo matching network in terms of computation time and model size.
Citation
3D LiDAR and Stereo Fusion using Stereo Matching Network with Conditional Cost Volume Normalization.
Tsun-Hsuan Wang,
Hou-Ning Hu,
Chieh Hubert Lin,
Yi-Hsuan Tsai,
Wei-Chen Chiu,
Min Sun
 Paper (arXiv)
Paper (arXiv)
 Source Code
Source Code
@article{ccvnorm2019,
title={3D LiDAR and Stereo Fusion using Stereo Matching Network with Conditional Cost Volume Normalization},
author={Wang, Tsun-Hsuan and Hu, Hou-Ning and Lin, Chieh Hubert and Tsai, Yi-Hsuan and Chiu, Wei-Chen and Sun, Min},
journal={arXiv preprint arXiv:xxxx.xxxxx},
year={2019}}